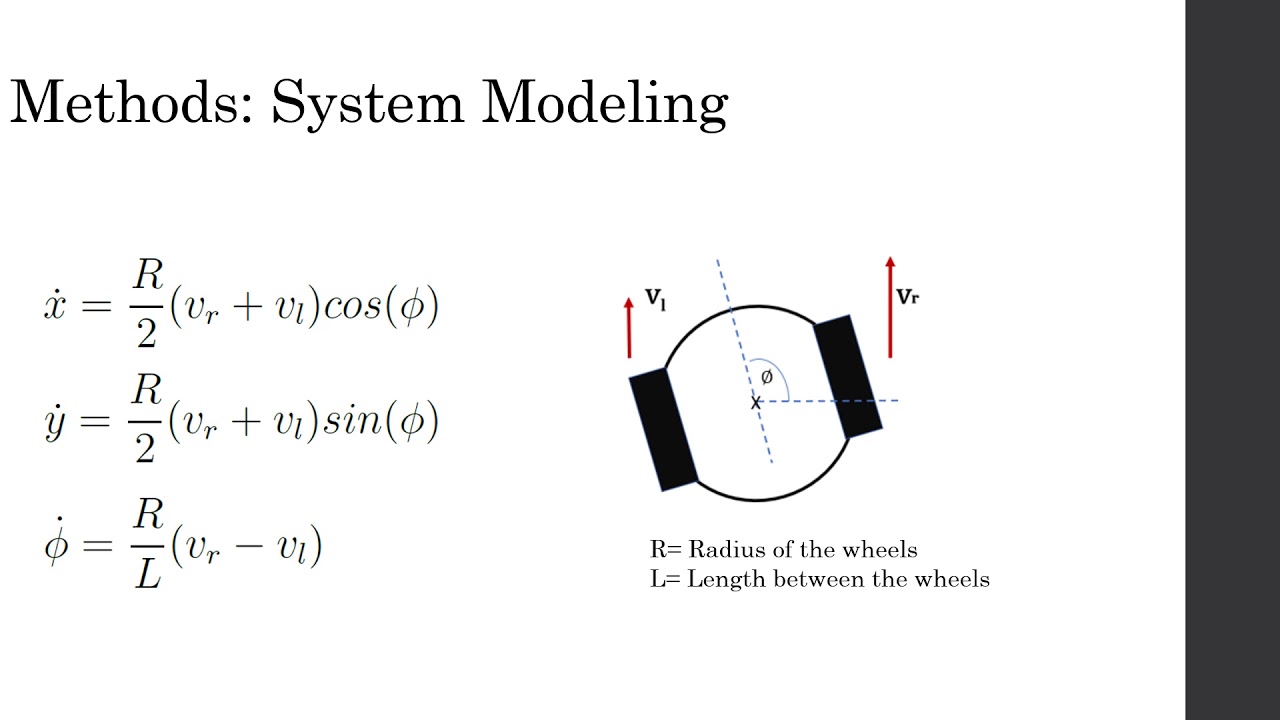
System Modeling: Path Tracking for Differential Steering Drive Autonomous Robots Computational Medicine Lab 4:37 4 years ago 10 922 Скачать Далее
Position Control of Differential Drive Mobile Robot - Complete Tutorial with Simulation Animation Aleksandar Haber 16:12 9 months ago 5 610 Скачать Далее
Path Tracking Control of a Differential Drive Robot using MATLAB & SImulink Aaron Díaz 0:13 4 years ago 2 584 Скачать Далее
Path Tracking of a Differential Drive Robot using MATLAB TODAYS TECH 0:47 1 year ago 625 Скачать Далее
Model Predictive Control on a differential drive robot: Simulation and Analysis Pratik Kumbhare 15:37 1 year ago 1 219 Скачать Далее
Path planning and kinematic modelling for a differential drive robot Pratik Kumbhare 1:25 2 years ago 34 Скачать Далее
Kinematics and Dynamics Differential Steering Wheel Mobile Robot (WMR) Fahmizal 0:54 7 years ago 1 861 Скачать Далее
Energy Estimation Based on path tracking for a Differential Drive WheeledMobile Robot ICCSRE 10:42 3 years ago 174 Скачать Далее
Trajectory Tracking for Autonomous Robotic vehicles using MATLAB TODAYS TECH 0:41 1 year ago 427 Скачать Далее
mod01lec03 - Introduction to Mobile Robot Kinematics NPTEL-NOC IITM 27:33 3 years ago 21 881 Скачать Далее
Autonomous Vehicle Path-Tracking Simulation (Moving Frame) Sina Milani 0:11 3 years ago 133 Скачать Далее
Control of Differential Drive Robots for Path Traversal Engineering Educator Academy 54:29 2 years ago 5 254 Скачать Далее
Path Tracking of a Two-Wheel Steering Mobile Robot: An Accurate and Robust Multi-Model Off-Road Stee ICRA 2018 2:52 6 years ago 1 155 Скачать Далее